 |
|
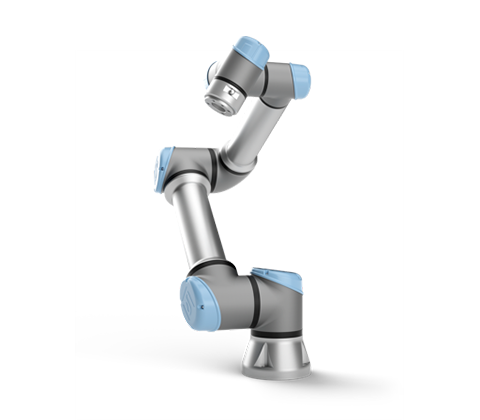
Universal Robot UR5e
Payload: 5 kg
Reach: 80 mm
Number of axes: 6
Weight: 21 kg
Sensors: joint angle and wrist force/torque
Controller: UR industrial controller
Web site
|
 |
|
Franka Emika Panda
Payload: 2 kg
Reach: 855 mm
Number of axes: 7
Weight: 18 kg
Sensors: joint angle and joint torque
Controller: open control architecture
Web site
|
 |
|
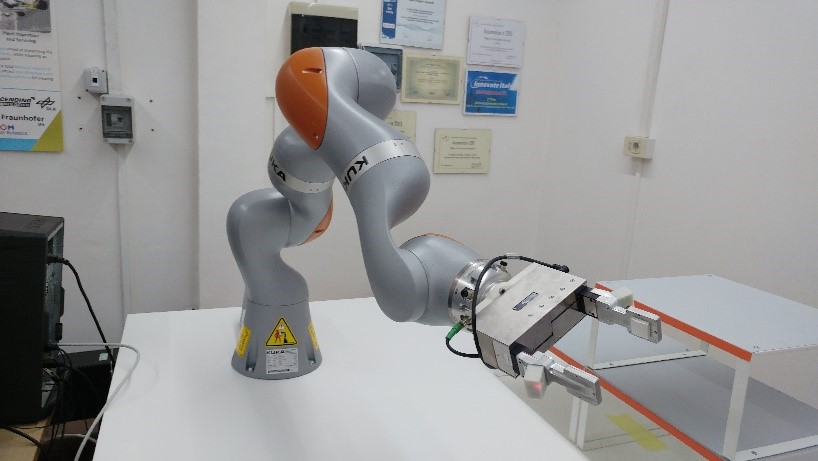
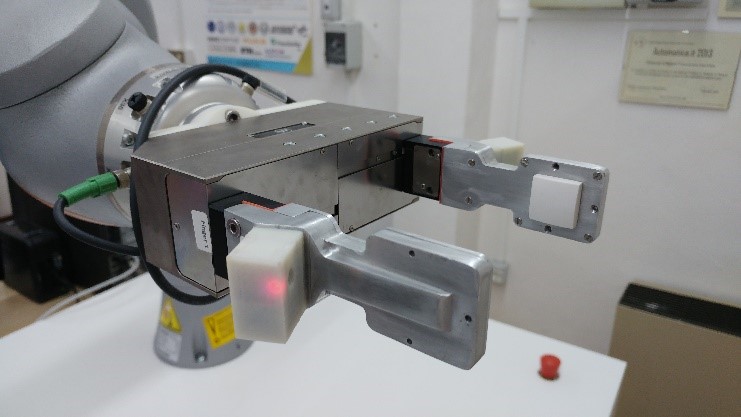
Kuka LBR iiwa
Payload: 7 kg
Reach: 800 mm
Number of axes: 7
Weight: 22 kg
Sensors: joint angle and joint torque
Controller: Kuka Sunrise Cabinet
Web site
|
 |
|
Kuka youBot
Arm
Payload: 0.5 kg
Reach: 655 mm
Number of axes: 5
Weight: 5.3 kg
Sensors: joint angles
Controller: Ethercat servo boards
Mobile base
Payload: 20 kg
Weight: 20 kg
4 omnidirectional wheels
Controller: Ethercat servo boards
Web site
|
 |
|
Yaskawa Motoman SIA5F
Payload: 5 kg
Reach: 559 mm
Number of axes: 7
Weight: 30kg
Sensors: joint angle
Controller: FS100
Web site
|
| |
|
|
 |
|
Weiss robotics WSG-50 gripper
Stroke: 110 mm
Gripping speed: 5 - 420 mm/s
Gripping force: 5 – 80 N
Weight: 1.2 kg
Interface: 10/100 Mb/s Ethernet
Web site
|
 |
|
Weiss robotics WSG-32 gripper
Stroke: 68 mm
Gripping speed: 5 - 400 mm/s
Gripping force: 5 – 50 N
Weight: 0.55 kg
Interface: 10/100 Mb/s Ethernet
Web site
|
 |
|
Optris thermal camera PI 450
Optical resolution: 382 x 288 pixels
Measurement range: 200 °C
Frame rate: 80 Hz/ switchable to 27 Hz
Accuracy: ±2 °C
Interface: USB
Web site
|
 |
|
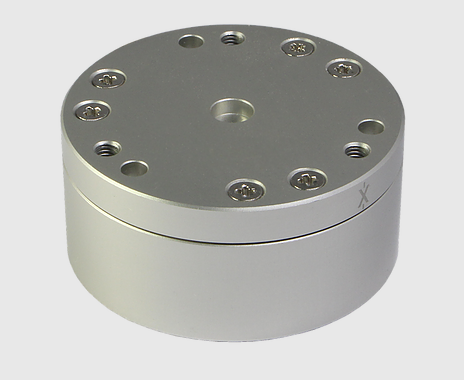
Robotous RFT-40 and RFT-60 force sensors
| RFT-40 |
|
RFT-60 |
Diameter: 40 mm
Data rate: 200 Hz
Range: 100 N (fx,fy), 150 N (fz), 2.5 Nm (T)
Weight: 60 g
Interface: USB |
|
Diameter: 40 mm
Data rate: 200 Hz
Range: 100 N (fx,fy), 150 N (fz), 2.5 Nm (T)
Weight: 60 g
Interface: USB |
Web site
|
|


|
|
Microsoft Kinect v1 and Intel Realsense D435
| Kinect v1 |
|
D435 |
FOV: 57° x 43°
Depth resolution : 320 x 240
Frame rate: 30 Hz
Min range: 0.8 m
Max range: 4 m
Interface: USB |
|
FOV: 85.2° x 58°
Depth resolution: Up to 1280 x 720
Frame rate: up to 90 Hz
Min range: 0.2 m
Max range: 10 m
Interface: USB |
Web site
|
 |
|
Stratasys Mojo 3D printer
Printing technology: FDM
Build size: 12,7 x 12,7 x 12,7 cm
Layer thickness: 0.17 mm
Material: P430 ABSplus
Weight: 27 kg
Web site
|
| |
|
|